
Controle de potência via PWM - ESP32
Controle de potência via PWM - ESP32
A modulação por largura de pulso (PWM) é uma técnica amplamente utilizada em diversos meios, principalmente para controle de potência e velocidade. Neste tutorial, você aprenderá a configurar o PWM no ESP32 através do recurso LED PWM e fazer um LED "respirar" (fade) ou acender com metade do brilho.
[toc]
Pulse Width Modulation
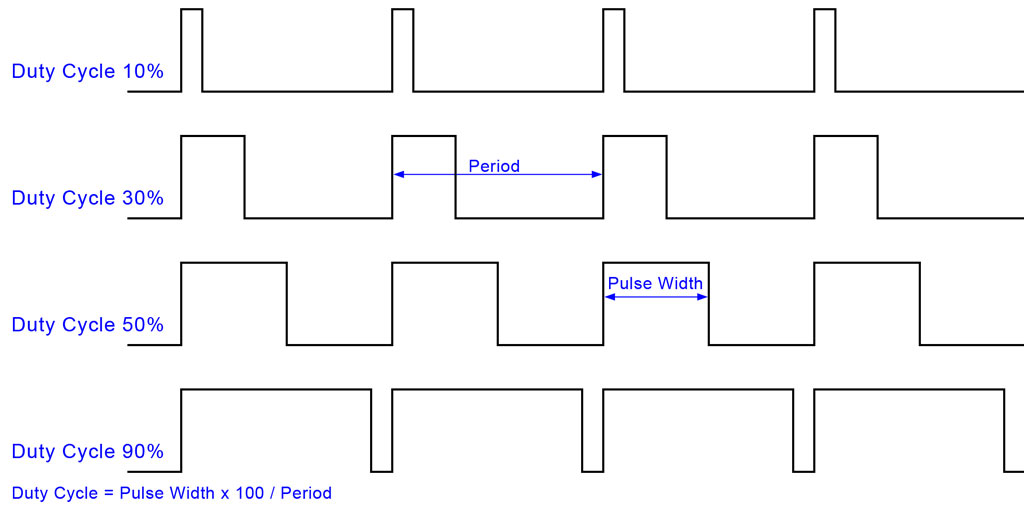
Com o PWM, podemos controlar a tensão média em um componente, e por consequência a potência, como um LED, a velocidade de um motor DC ou até converter o sinal PWM criado (onda quadrada) para uma onda senoidal com a adição de alguns poucos itens.
As imagens (GIF) abaixo mostram o duty cycle variando, que altera a tensão média entregue ao componente. Em alguns casos como motores, também é preciso configurar corretamente a frequência de chaveamento e ter atenção ao nível de pico máximo aceito na alimentação, entretanto isso ficará de "lição de casa" para pesquisarem.
Mãos a obra - Variando o brilho do LED
Componentes necessários
- 1x - LED (Usaremos o LED Onboard).
- 1x - ESP32 (Usaremos o NodeMCU-32).
Código do projeto
void setup()
{
pinMode(2, OUTPUT);//Definimos o pino 2 (LED) como saída.
ledcAttachPin(2, 0);//Atribuimos o pino 2 ao canal 0.
ledcSetup(0, 1000, 10);//Atribuimos ao canal 0 a frequencia de 1000Hz com resolucao de 10bits.
}
void loop()
{
for (int i = 0; i < 1024; i++)
{
ledcWrite(0, i);//Escrevemos no canal 0, o duty cycle "i".
delay(2);
}
for (int i = 1023; i > 0; i--)
{
ledcWrite(0, i);
delay(2);
}
}
Colocando para funcionar
O código fará um "fade" no LED, dando a sensação de "respiração", aumentando e diminuindo o brilho gradativamente.
Entendendo a fundo
Software
-Função ledcAttachPin()
ledcAttachPin(PINO, CANAL);
Esta função apenas atribui um pino a um canal. Podemos escolher qualquer pino a qualquer canal, este vai de 0 a 15, totalizando 16 canais.
Cada canal é independente do outro, mas você também pode atribuir vários pinos a um mesmo canal.
Pino: Qualquer.
Canal: 0 - 15.
-Função ledcSetup()
ledcSetup(CANAL, FREQUENCIA, RESOLUCAO);
Esta função configura um canal para trabalhar a uma determinada frequência e resolução.
Canal: 0 - 15.
Frequência: 1 - 40MHz.
Resolução: 1 - 16 bits.
-Função ledcWrite()
ledcWrite(CANAL, DUTY CYCLE);
Esta função "escreve" o duty cycle ao canal. Lembramos que o valor colocado no parâmetro duty cycle não é em porcentagem e sim em decimal.
Exemplo: para um duty cycle de 50% com 10bits (2^10 = 1024) de resolução, devemos escrever 512.
Canal: 0 - 15.
Duty cycle: 0 - 100% (em decimal).
Indo além com PWM
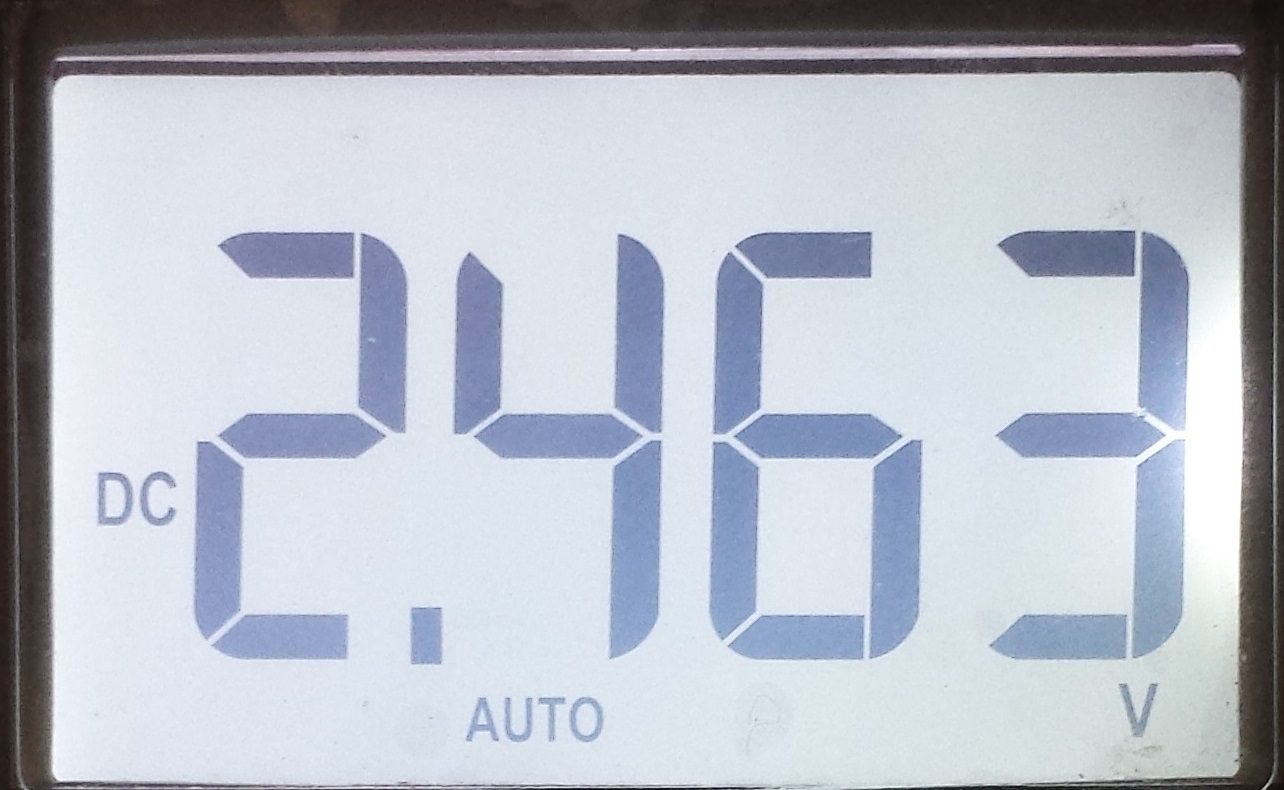
Tensão média
Podemos calcular a tensão média (V) entregue ao componente através de uma simples conta que relaciona o sinal HIGH com o duty cycle.
Sinal HIGH do ESP32 (Vcc): ~3.3V.
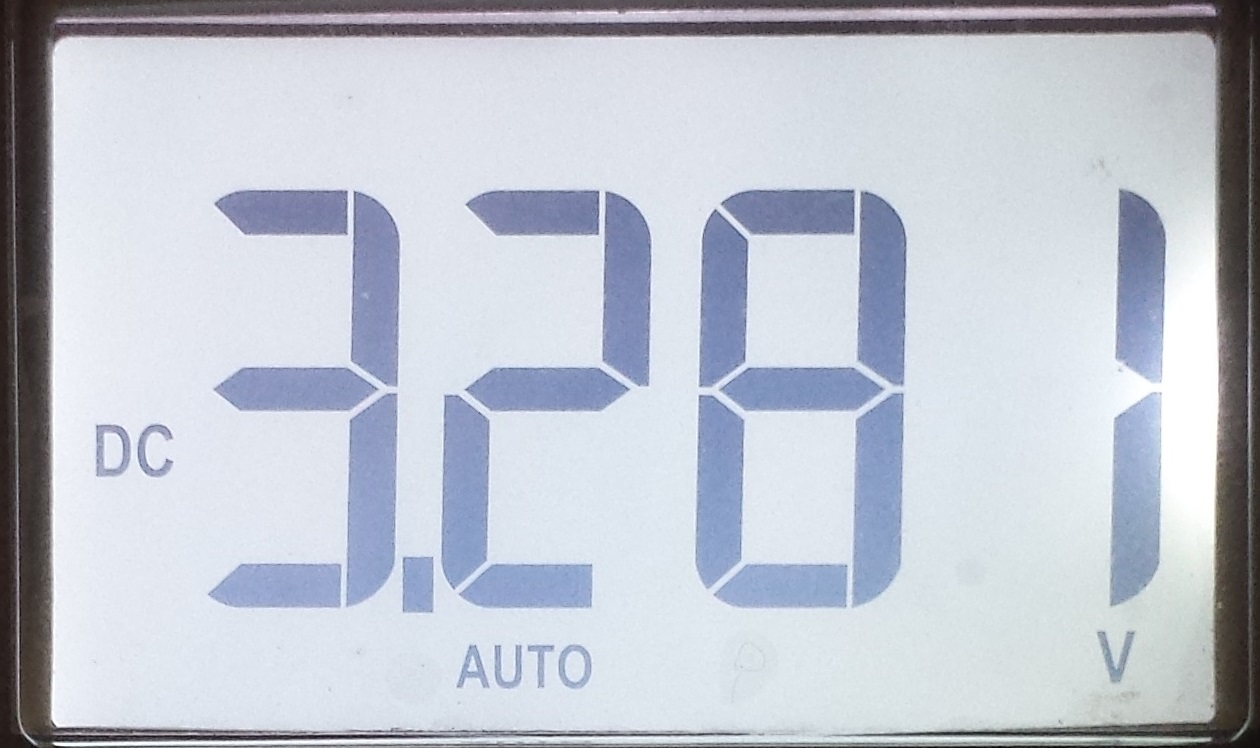
Duty cycle: 32%.
Ao efetuar a conta de 3.3*0.32, chegamos a conclusão que a tensão média (Vm) entregue será de 1.056V!
Vamos testar este código e verificar as tensões com um multímetro.
void setup()
{
pinMode(23, OUTPUT);//Definimos o pino 23 como saída.
pinMode(22, OUTPUT);//Definimos o pino 22 como saída.
pinMode(21, OUTPUT);//Definimos o pino 21 como saída.
pinMode(19, OUTPUT);//Definimos o pino 19 como saída.
ledcAttachPin(23, 0);//Atribuimos o pino 23 ao canal 0.
ledcSetup(0, 1000, 10);//Atribuimos ao canal 0 a frequencia de 1000Hz com resolucao de 10bits.
ledcWrite(0, 256);//Escrevemos um duty cycle de 25% no canal 0.
ledcAttachPin(22, 1);//Atribuimos o pino 22 ao canal 1.
ledcSetup(1, 1000, 10);//Atribuimos ao canal 1 a frequencia de 1000Hz com resolucao de 10bits.
ledcWrite(1, 512);//Escrevemos um duty cycle de 50% no canal 1.
ledcAttachPin(21, 2);//Atribuimos o pino 21 ao canal 2.
ledcSetup(2, 1000, 10);//Atribuimos ao canal 2 a frequencia de 1000Hz com resolucao de 10bits.
ledcWrite(2, 768);//Escrevemos um duty cycle de 75% no canal 2.
ledcAttachPin(19, 3);//Atribuimos o pino 19 ao canal 3.
ledcSetup(3, 1000, 10);//Atribuimos ao canal 3 a frequencia de 1000Hz com resolucao de 10bits.
ledcWrite(3, 1023);//Escrevemos um duty cycle de 100% no canal 3.
}
void loop()
{
}
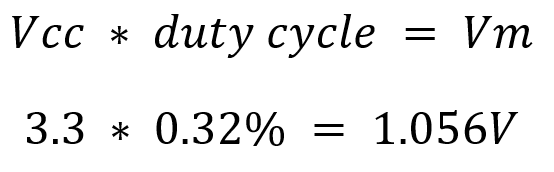
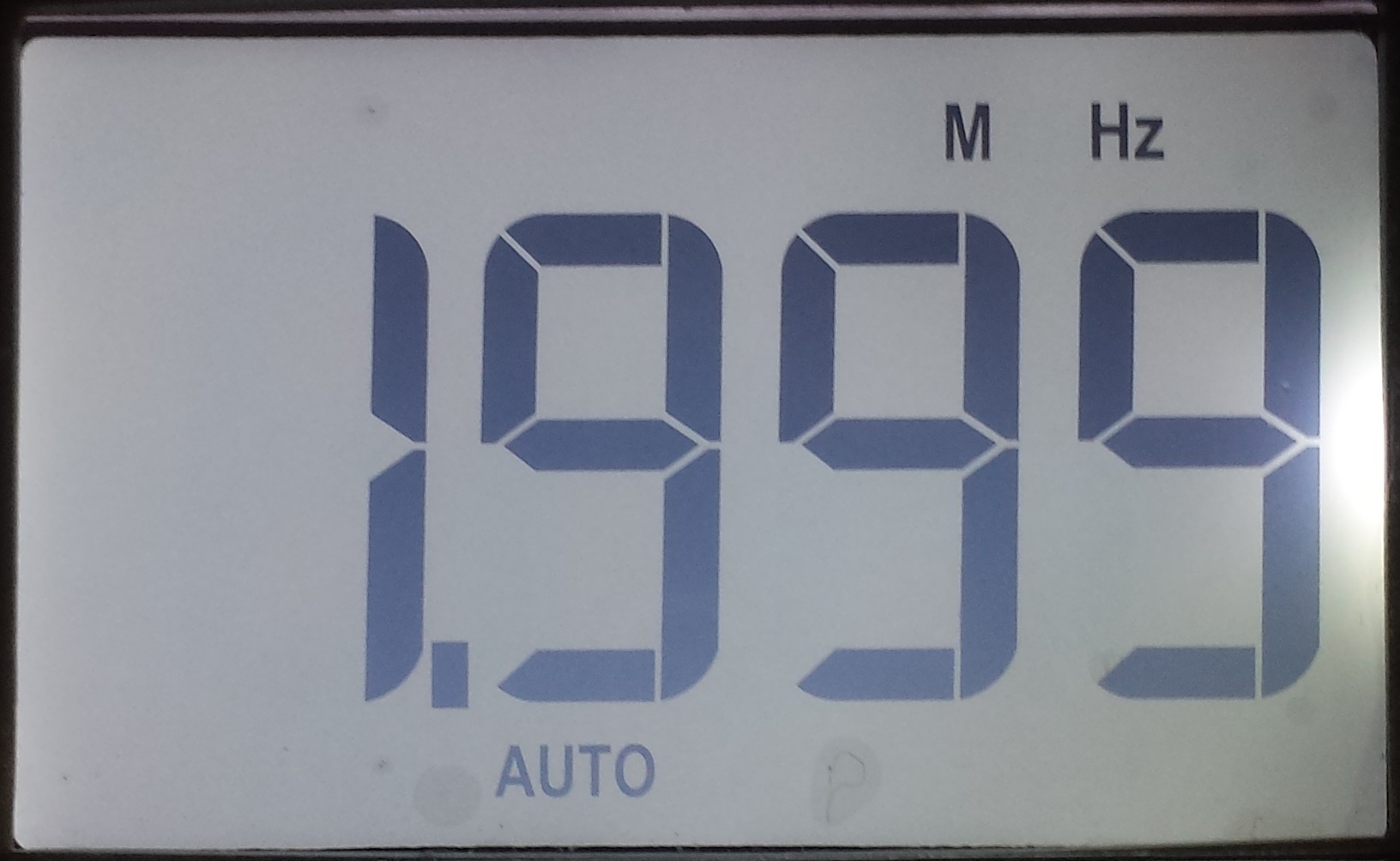
Testando este código e verificando o pino respectivo com um multímetro, podemos perceber que as contas são iguais ou próximas. Lembrando que o próprio multímetro tem sua faixa de precisão (erro), que neste caso é (+-0.5% + 3D com 1mV de resolução).
Todos os testes a seguir tem Vcc teórico de 3.3V, as imagens são as leituras do nosso multímetro.
Caso 1, 25% = 0.825V
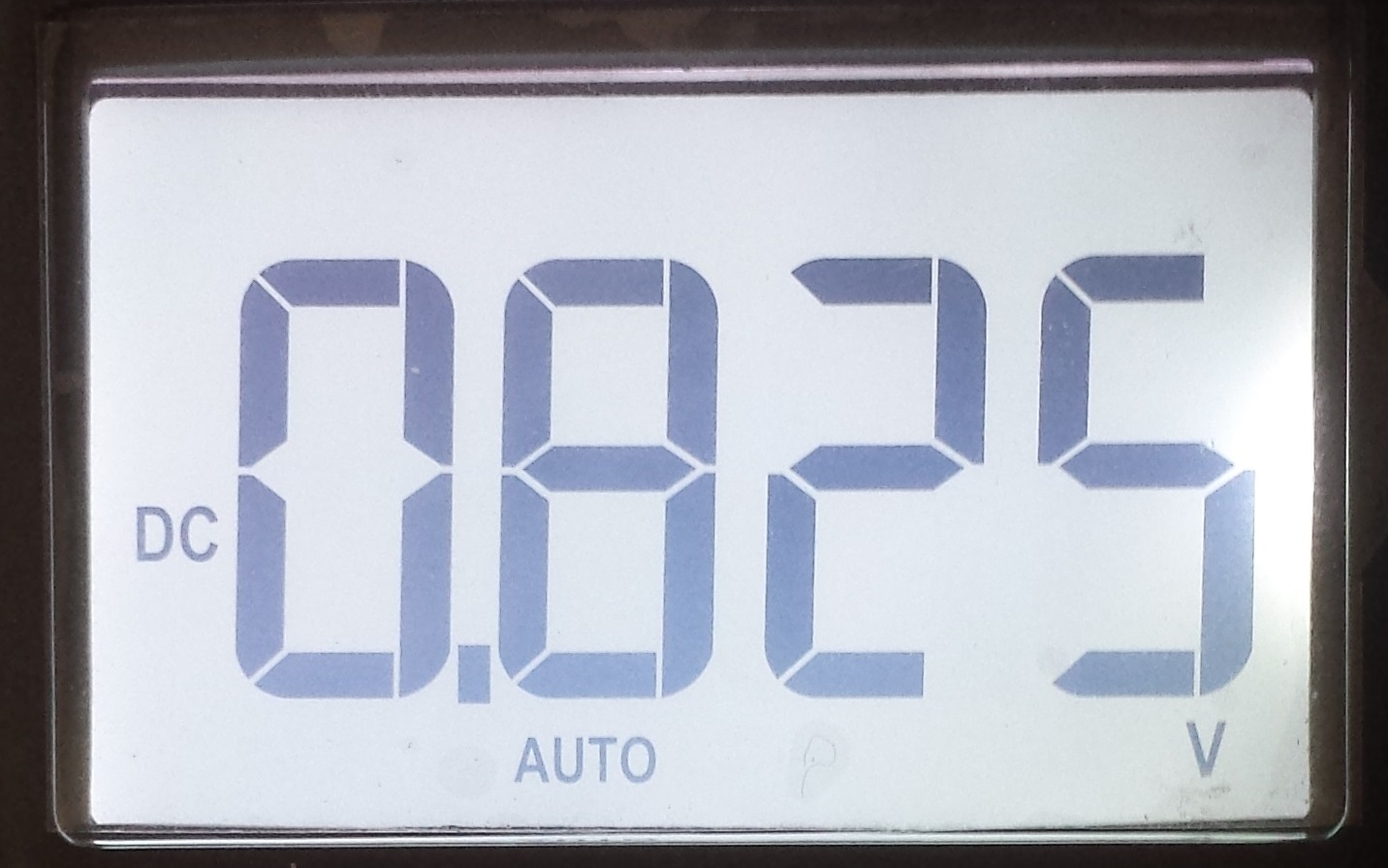
Caso 2, 50% = 1.65V
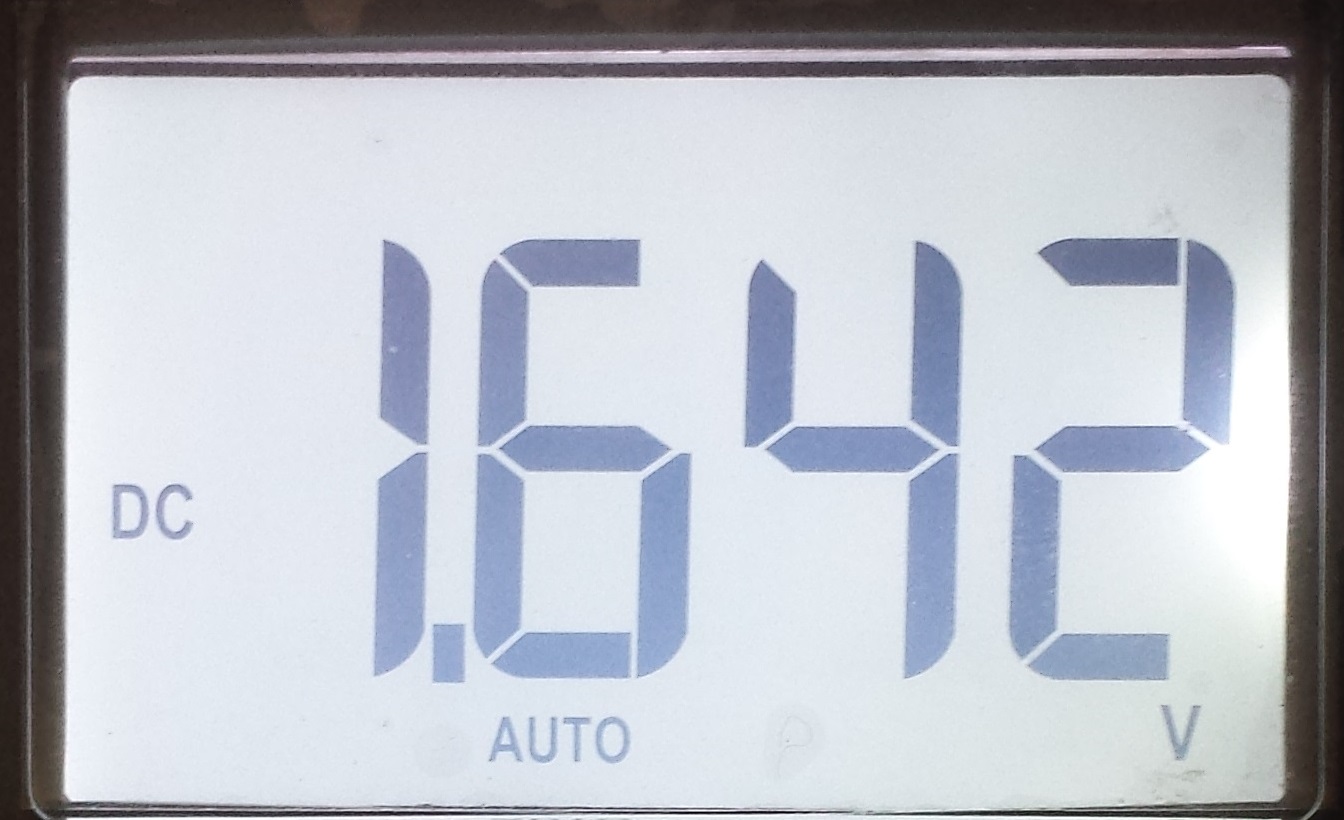
Caso 3, 75% = 2.475V
Caso 4, 100% = 3.3V
Todos os valores lidos, mesmo estando próximos aos teóricos, há o erro do multímetro. Aplicando a formula de erro ao valor lido, todos os valores obtidos estão dentro da faixa tolerável de erro, ou seja, estão corretos!
Frequência X resolução
Um problema recorrente com alguns componentes é a frequência necessária de funcionamento. Motores por exemplo, é bastante usado entre 20kHz e 200kHz.
O recurso "LED PWM" do ESP32 é baseado em um clock de 80MHz, logo podemos fazer algumas contas básicas para se chegar a frequência máxima com a resolução escolhida.
Nos exemplos acima, foi usado uma frequência de 1kHz com 10bits de resolução, entretanto pode ser necessário o uso de uma frequência muito maior e a resolução é uma das barreiras para isso. Vamos fazer essa conta com os dados citados para chegar na frequência máxima (Fm).
A resolução deve ser em decimal e não "bits".
80MHz / 10bits
80000000 / 1024 = 78125Hz
A frequência máxima que conseguimos chegar com uma resolução de 10bits no ESP32 é de ~78kHz. Vamos testar!
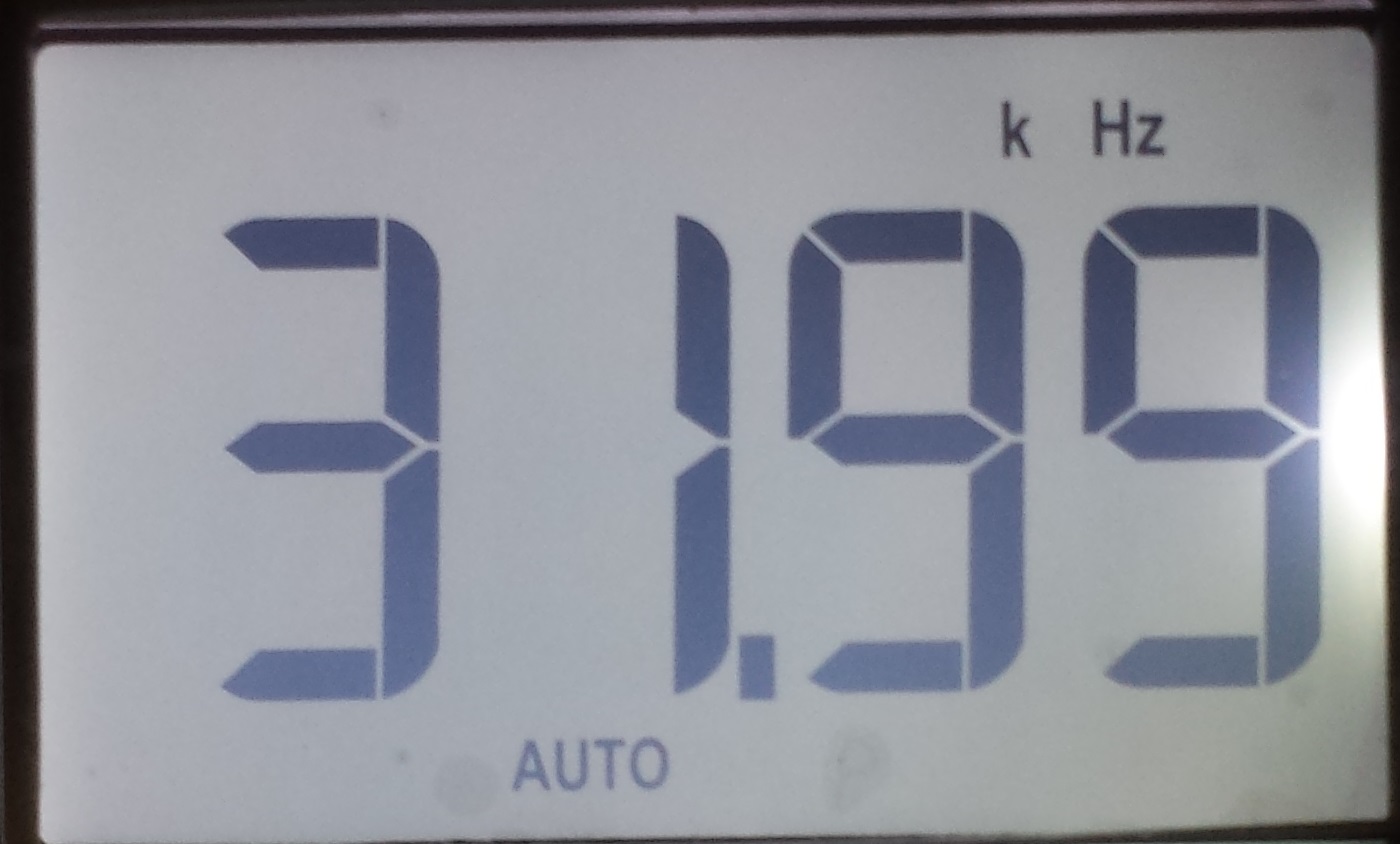
Caso 1, 32kHz com 10bits
Caso 1.1, 80kHz com 10bits
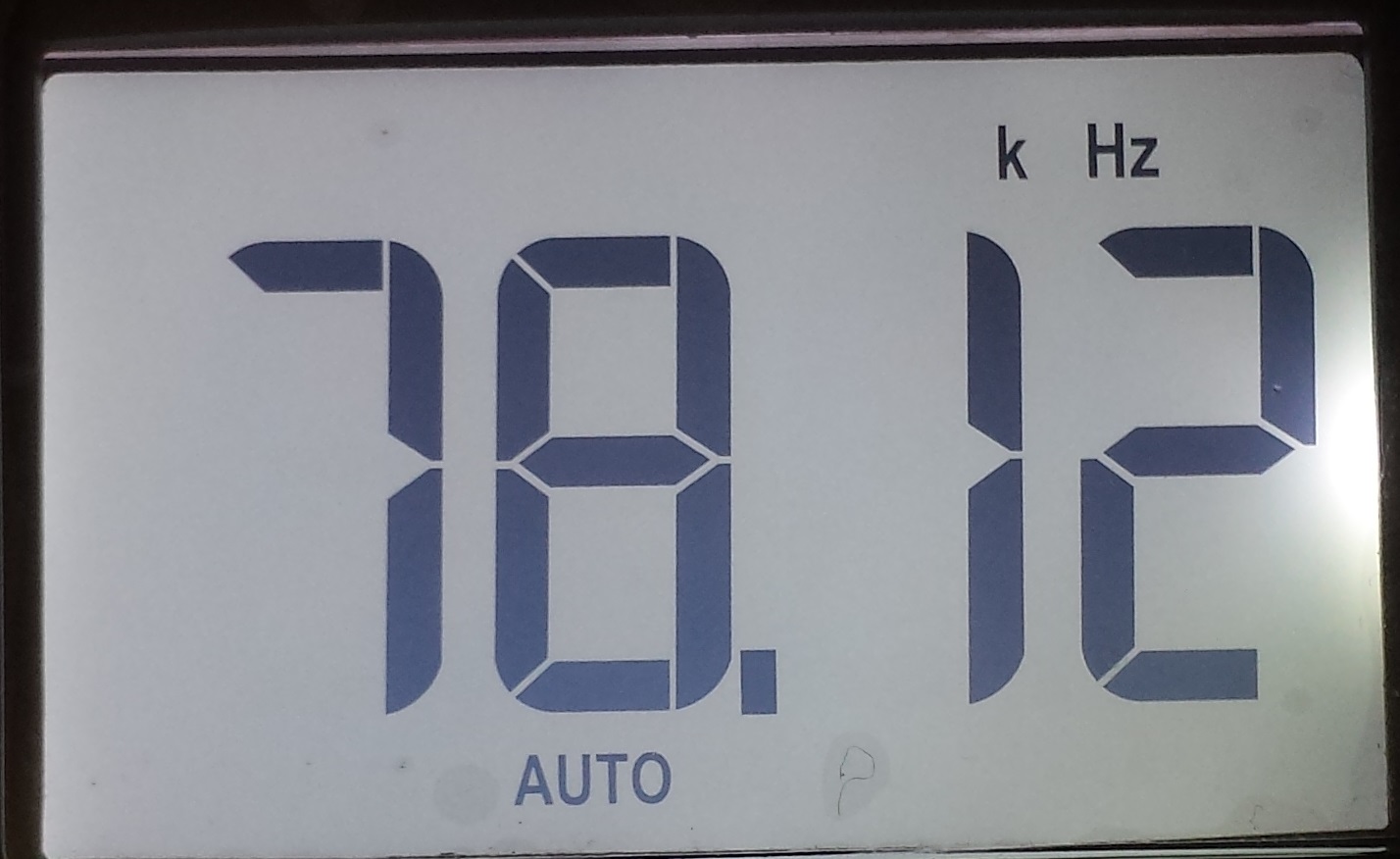
Como feito nas contas, a frequência máxima realmente foi de ~78kHz para 10bits, mesmo atribuindo 80kHz no código. Agora vamos brincar com frequências mais altas deixando a resolução em 3bits e ver a frequência máxima.
80MHz / 3bits = Fm
80000000 / 8 = 10MHz
Caso 2, 2MHz com 3bits
Caso 2.1: 11MHz com 3bits
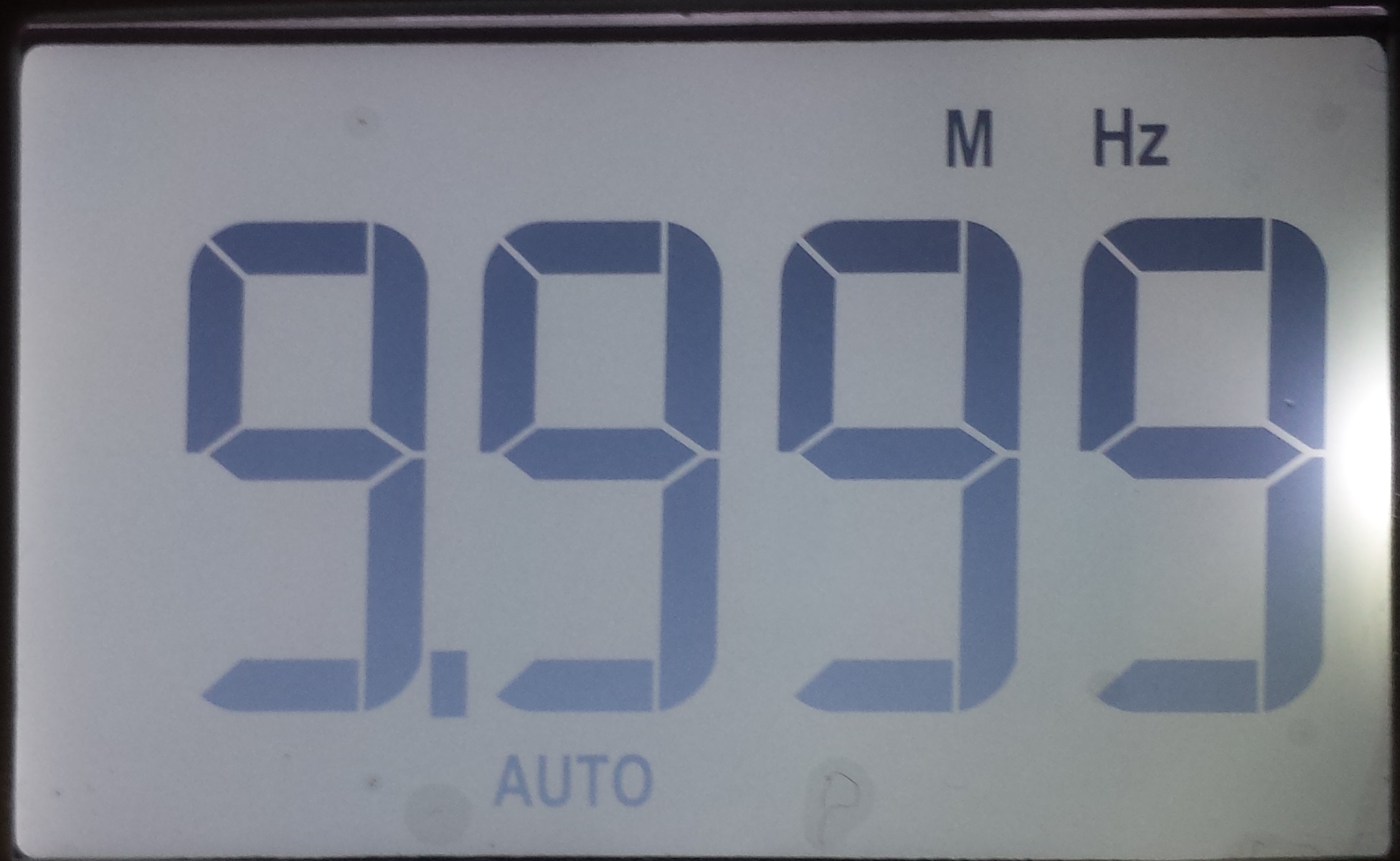
Novamente, as contas mostraram um máximo de 10MHz e mesmo atribuindo 11MHz, ficou limitado a 10MHz.
Considerações finais
O PWM é extremamente útil em diversos projetos, permitindo o controle de potência, velocidade, brilho e até inversores (DC-AC) através da modulação da tensão. Apesar de parecer simples apenas "inverter o estado do pino", com frequências um pouco mais altas, não é qualquer microcontrolador que aguenta se manter com uma frequência estável ou se quer chegar em frequências acima de 10MHz. O ESP32 com 1bit de resolução nos permite chegar a 40MHz, dando uma vasta gama de possibilidades em aplicações.

Software Timer - ESP8266
Software Timer
Em várias situações, é necessário de certa forma, a manipulação do tempo em micro controladores. O jeito mais fácil é pelas funções básicas (delay e derivados), porém, normalmente, estas funções travam o micro controlador, e com isto, você é incapaz de ler botões ou algo do tipo enquanto o delay não acabar. Isto além de gerar terríveis problemas nos mais variados projetos, não é uma pratica saudável. Neste tutorial, vamos aprender sobre o OS_TIMER do ESP8266, este timer é baseado no software do ESP8266 e o limite inferior é 1mS e máximo de ~2 horas. Este software timer não é aconselhado para projetos em que o tempo é crítico. Apesar de nossos testes darem certa confiança, por ele ser baseado em software, alguns fatores podem atrasa-lo em alguns mS, tome cuidado.

Demonstrando a diferença
Neste exemplo apenas para comparação do Software Timer, usaremos um exemplo que acende 3 LEDs a cada 1 segundo e enquanto isso, ficaremos enviando dados na Serial para mostrar o funcionamento do código. Antes de ir para o software timer, testem este código abaixo no ESP8266 e veja no Serial Monitor como é o recebimento de informações.
Neste código, estamos usando Delay para fazer o acionamento simples dos LEDs. Você perceberá que só irá aparecer mensagens a cada 4 Segundos.
long x;//Variavel para mostrar o desenvolvimento do codigo no Serial Monitor.
void setup()
{
pinMode(D1, OUTPUT);//Define D1 como Saida.
pinMode(D2, OUTPUT);//Define D2 como Saida.
pinMode(D3, OUTPUT);//Define D3 como Saida.
Serial.begin(9600);//Inicia a comunicaçao Serial para provar que o codigo nao trava.
}
void loop()
{
led();//Sub rotina para acender os LED`s.
Serial.println(x++);//Mostra no serial monitor o desenvolvimento do codigo.
}
void led()//Sub rotina para acender os LED`s.
{
digitalWrite(D1, 1);//Acende o led 1.
delay(1000);//Aguarda 1 segundo.
digitalWrite(D2, 1);//Acende o led 2.
delay(1000);//Aguarda 1 segundo.
digitalWrite(D3, 1);//Acende o led 3.
delay(1000);//Aguarda 1 segundo.
digitalWrite(D1, 0);//-
digitalWrite(D2, 0);//-
digitalWrite(D3, 0);//-Apaga os 3 leds.
delay(1000);//Aguarda 1 segundo.
}
Após ver que o ESP só pula para a linha debaixo da função led() a cada 4 segundos, percebe-se que o ESP fica travado durante 4 segundos apenas para acender os LEDs, inutilizando totalmente o seu uso para outras coisas.
Agora chega de papo e vamos ao Software Timer.

Normalmente, na maioria dos casos, as funções de delay travam o código até que o delay se acabe. Ao usar delay(60000), o micro controlador ficará travado por 1 Minuto nesta linha até que o tempo acabe e não fara mais nada. Se desejarmos acender um LED a cada 30 segundos, isto irá gerar muitos problemas usando delay, então, usaremos os Timer’s. O Timer gera uma interrupção no sistema a cada intervalo de tempo e voltara a fazer a sua rotina padrão após terminar suas instruções.
Lembre-se, A rotina de um timer (Interrupção) não pode conter comandos de Delay, Serial e vários outros. A rotina do ISR deve ser a mais breve possível e normalmente usamos flag’s armazenadas na RAM para agilizar o processo e evitar erros internos.
Mãos à obra
Componentes necessários
- 1 – ESP8266 (Usaremos o NodeMCU).
- 3 – LED's.
- 3 - Resistores de 220 Ω.
- Fios Jumpers.
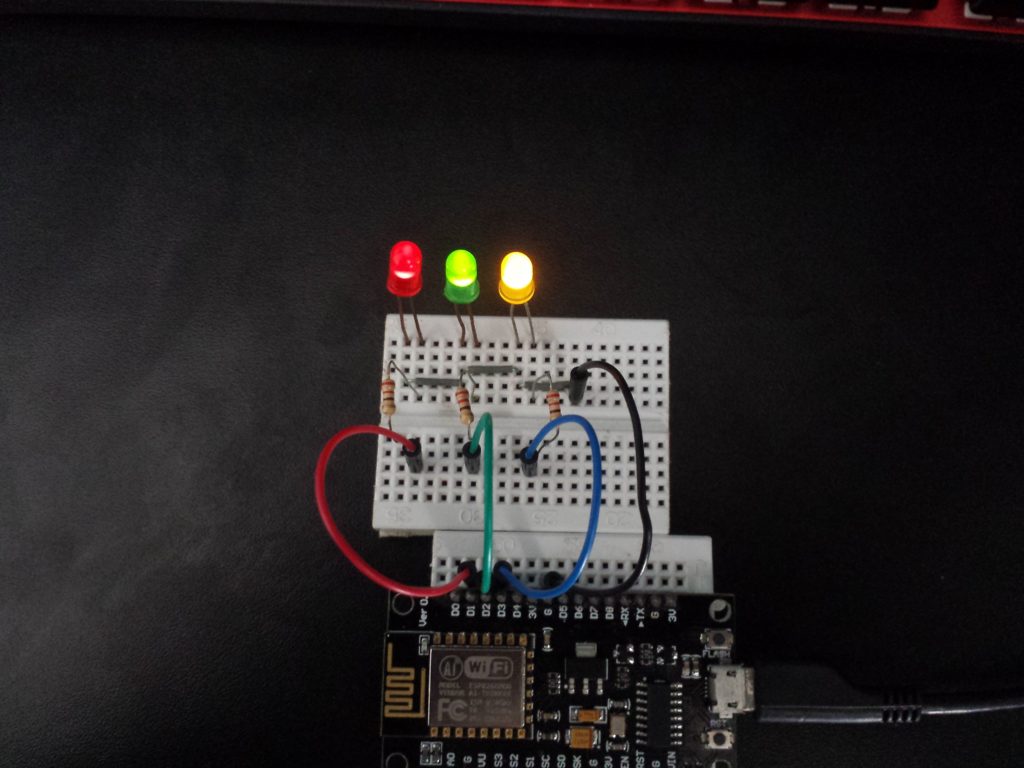
Montando o projeto
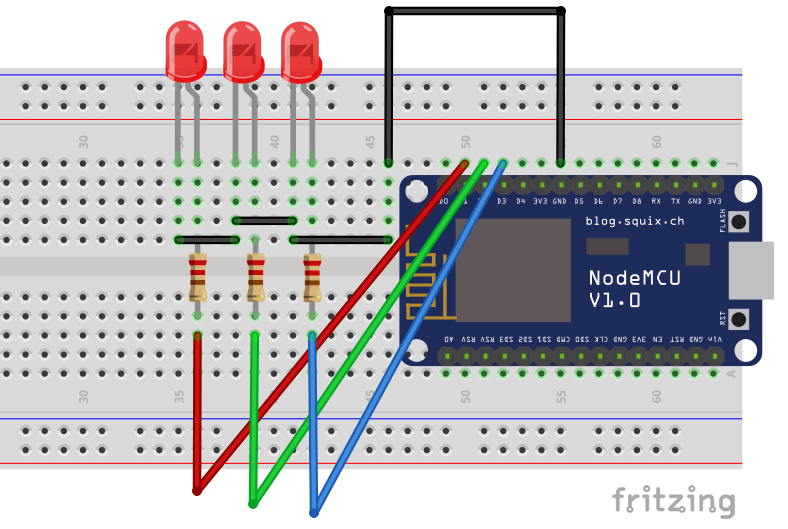
Veja como ficou nossa montagem:
Código do projeto
#include <user_interface.h>;//Biblioteca necessaria para acessar os Timer`s.
os_timer_t tmr0;//Cria o Timer. Maximo de 7 Timer's.
volatile byte status;//Variavel armazenada na RAM para Status do LED.
long x;//Variavel para mostrar o funcionamento do Codigo.
void setup()
{
os_timer_setfn(&tmr0, led, NULL); //Indica ao Timer qual sera sua Sub rotina.
os_timer_arm(&tmr0, 1000, true); //Inidica ao Timer seu Tempo em mS e se sera repetido ou apenas uma vez (loop = true)
//Neste caso, queremos que o processo seja repetido, entao usaremos TRUE.
pinMode(D1, OUTPUT);//Define D1 como Saida.
pinMode(D2, OUTPUT);//Define D2 como Saida.
pinMode(D3, OUTPUT);//Define D3 como Saida.
Serial.begin(9600);//Inicia a comunicaçao Serial.
}
void loop()
{
leitura();//Sub rotina para processar os LED`s.
//O codigo irá funcionar normalmente sem que haja delays e acendendo os LED`s no intervalo definido.
//Para demonstraçao, abra o Serial monitor e voce vera que o codigo continua normalmente.
Serial.println(x++);//Print para provar que o codigo nao trava. Abra o Serial monitor e veja
//que o codigo continua rodando enquanto os LED`s piscam a cada 1 Segundo.
}
void leitura()//Sub rotina para processar os LED`s.
{
switch (status)
{
case(1)://Caso status seja 1, acenda o led 1.
digitalWrite(D1, 1);
break;
case(2)://Caso status seja 2, acenda o led 2.
digitalWrite(D2, 1);
break;
case(3)://Caso status seja 3, acenda o led 3.
digitalWrite(D3, 1);
break;
case(4)://Caso status seja 4, Apague os 3 LED`s.
digitalWrite(D1, 0);
digitalWrite(D2, 0);
digitalWrite(D3, 0);
break;
}
}
void led(void*z)//Sub rotina ISR do Timer sera acessada a cada 1 Segundo e mudara o status do LED.
{
if (status == 4)//Verifica se o maximo foi alcançado para resetar a contagem.
{
status = 0;
}
status++;
}
Entendendo a fundo
Hardware
As ligações são simples, apenas sendo necessário ligar o pino de cada LED em sua correspondente porta, não esquecendo o uso de resistores para limitar a corrente/tensão e também não queimar o LED. O outro pino do LED no GND. Este é o básico para um LED funcionar.
Software
-Função os_timer_setfn()
os_timer_setfn(&tmr0, led, NULL);
Esta função atribui uma função sua à rotina do Timer. Neste caso, definimos a nossa função led() ao timer tmr0, que criamos anteriormente.
-Função os_timer_arm()
os_timer_arm(&tmr0, 1000, true);
Com esta outra, é definido o tempo do timer e também se irá se repetir (loop). Neste caso, definimos ao timer tmr0, que entre na função anteriormente atribuída, a cada 1000mS. Se você não precisa que isso seja repetido, troque true por false, desativando o loop.
Finalizando
Comparando os dois códigos, podemos perceber claramente a diferença entre fazer tarefas com um Timer ou Delay. Enquanto o primeiro código só mostra a mensagem a cada 4 Segundos, o segundo mostra a mensagem diversas vezes ao mesmo tempo que gerencia os LEDs. Você pode usar isso em vários projetos em que é preciso fazer tarefas em tempos definidos, sem travar o resto do sistema com Delay. Dúvidas? Sugestões? Críticas? Comente abaixo!

O que é ESP8266 - A Família ESP e o NodeMCU
O que é ESP8266 - A Família ESP e o NodeMCU
Que tal conectar seu projeto à imensidão da internet de forma simples e barata? Essa é a proposta do ESP8266 que têm sido cada vez mais usado em projetos de automação e robótica para conectar as mais diversas ideais à internet. Neste tutorial você irá conhecer a família de microcontroladores ESP8266 que é tendência no mundo dos Makers e nos mais diversos exemplos de Internet das Coisas (IoT), e também aprenderá como funciona a sua programação e dar o primeiro upload. Entre eles: ESP-01 A, ESP-7, ESP-12E e NodeMcu
[toc]
O que é ESP8266?
É possível que você já tenha ouvido falar sobre o ESP8266, ele tem se tornado cada vez mais popular entre projetos de Internet das Coisas!
Os ESP8266's são microcontroladores que já possuem tudo que é necessário para se conectar a Internet. Ou seja, eles são como um Arduino com integração Wi-Fi.
Outro ponto importante é que eles são pequenos e isso viabiliza projetos pequenos.
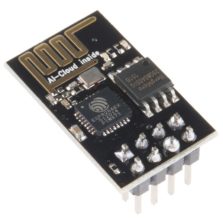
Um exemplo é o ESP8266-01, esta minúscula placa, também chamado de "Módulo" por alguns, tem um potencial muito maior do que o aparenta, veja algumas especificações:
- CPU: 32bit RISC Tensilica Xtensa LX106 rodando à 80/160 MHz.
- RAM: 64 kB.
- FLASH: QSPI Externo - de 512 kB até 4 MB.
- WiFi: IEEE 802.11 - b/g/n.
Comparando diretamente com o Arduino, o ESP8266 tem um poder de processamento maior, porem há poucas GPIO's para usar nesta versão. Esta versão, conta apenas com 4 GPIO's para uso, sendo que dois são para comunicação Serial.
Para resolver esse problema de pinos insuficientes, existem versões mais robustas do ESP8266, como por exemplo, este ESP8266-12:
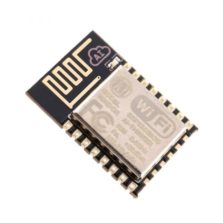
Este, é exatamente o mesmo que o anterior, mas conta com mais GPIO's disponíveis para uso geral.
APLICAÇÕES DO ESP8266
O uso para esse Micro controlador beira ao "Infinito", já que conta com poder de processamento e WiFi embutido. Com ele, também é possível ser usado como um "Módulo" com outros Micro controladores, isto pode ser feito através de comandos AT. Além disso, as versões menores, como o 01 ou 09, são muito usados como uma "Ponte Serial-WiFi", já que contam com poucos pinos; sendo assim, é possível receber dados por um aplicativo/WEB e enviar estes dados para um Arduino e acender uma lampada por exemplo! O oposto também é possível, enviar dados do Arduino para um aplicativo ou página WEB.
Algumas aplicações interessantes:
- Automação residencial.
- Rede de sensores.
- Robótica.
- Comunicação Wireless entre MCU's (Micro controller Unit).
- Aplicativos e Paginas WEB para controle geral.
- Monitoramento de Informações remotamente.
- E muito mais.

A Família ESP8266
Apresentaremos as principais características dos dois principais mais vendidos, que são: ESP8266-01 e o ESP8266-12 na versão NodeMCU.
ESP-01
Este pequeno ESP8266-01, conta com poucos pinos para uso geral, porém é muito usado por conta do seu tamanho como a "Ponte Serial-WiFi", segue a explicação dos pinos:
GND: Terra-GND.
Vcc: Alimentação de 3,3V.
RESET: Reset ativo quando em LOW.
CH_PD: Chip enable, deve estar em HIGH para funcionamento do MCU.
RXD: Receive data, usado para receber dados da comunicação de outros MCU's.
TXD: Tansmit data, usado para transmitir dados a outros MCU's.
GPIO0: GPIO (General Purpose Input/Output), este pino é para uso geral, tanto como Entrada/Saída e até Digital/PWM. Deve estar conectado ao GND para novos Upload's (Veja na Fig 4, Boot Modes).
GPIO2: GPIO para uso geral.
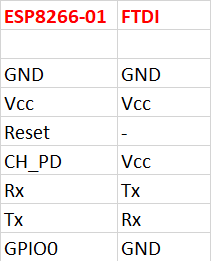
Para dar um novo upload à este carinha, você precisa de um conversor Serial (FTDI) para transmitir os dados até ele. As ligações são estas:
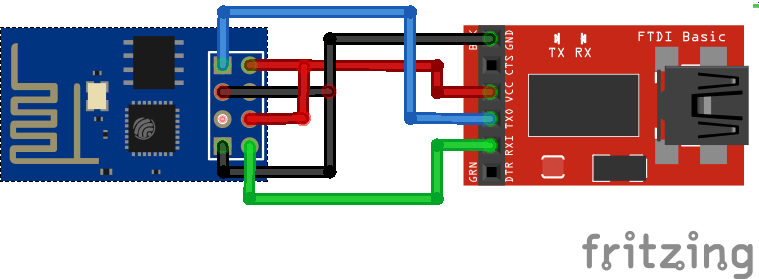
Lembrando que a alimentação deve ser feita com 3,3V, inclusive o Rx. Com isto, voce já sera capaz de dar upload de seus códigos.
NodeMCU
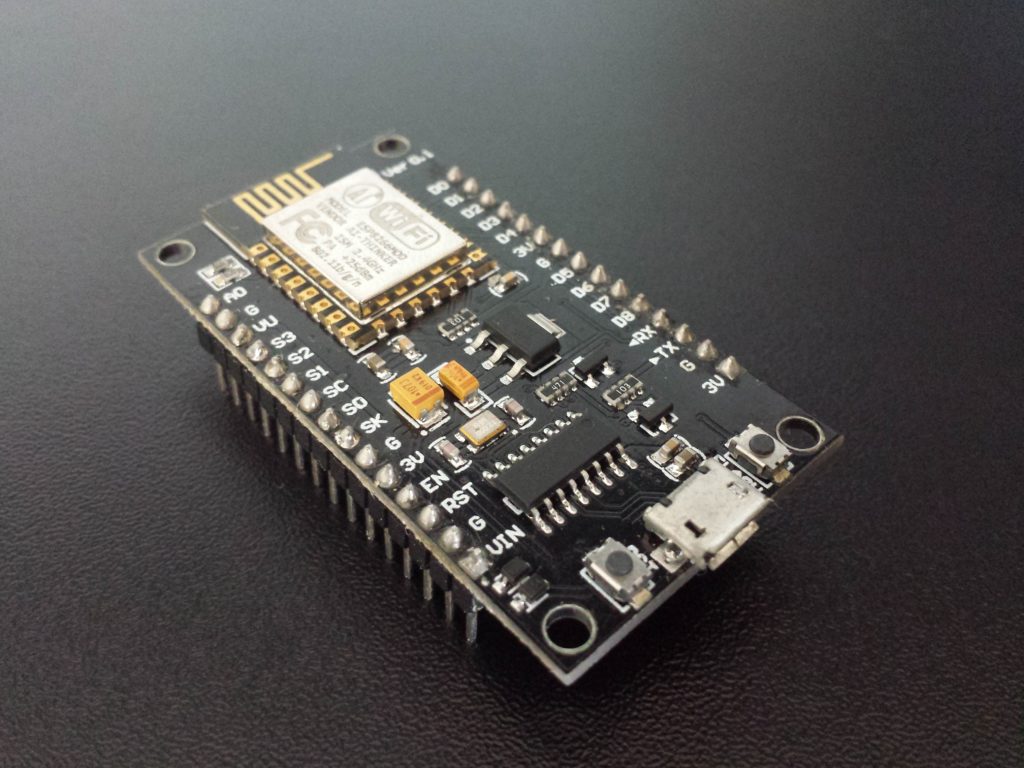
Esta versão do ESP8266-12 vem numa placa de desenvolvimento, chama-se de NodeMCU. Esta belezinha conta com conversor Serial e regulador de tensão próprio, não sendo necessário ambos como nas outras versões fora da placa. Também há pinos próprios para I2C, SPI, Analógico e outros.
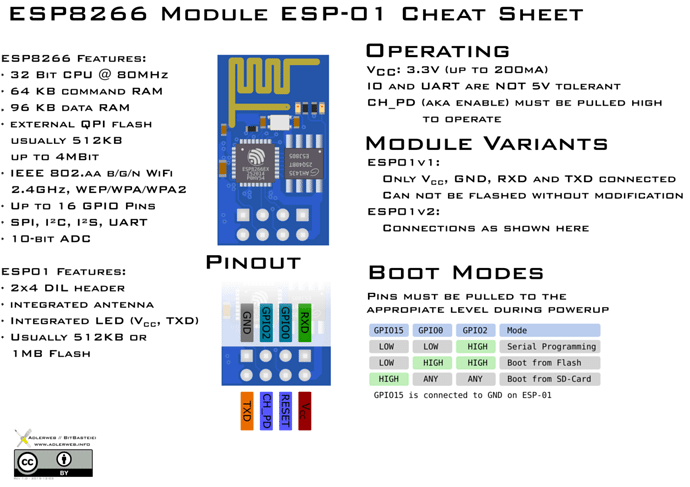
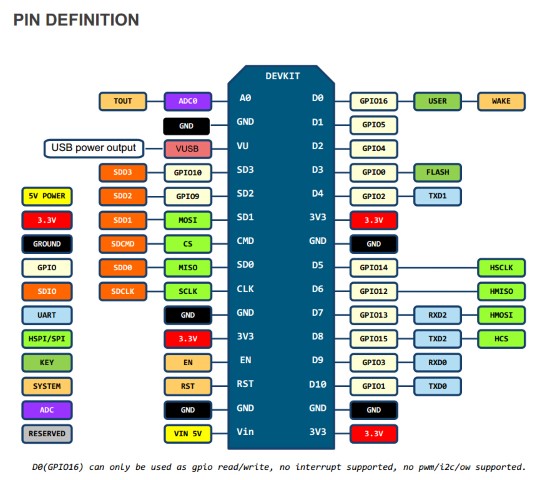
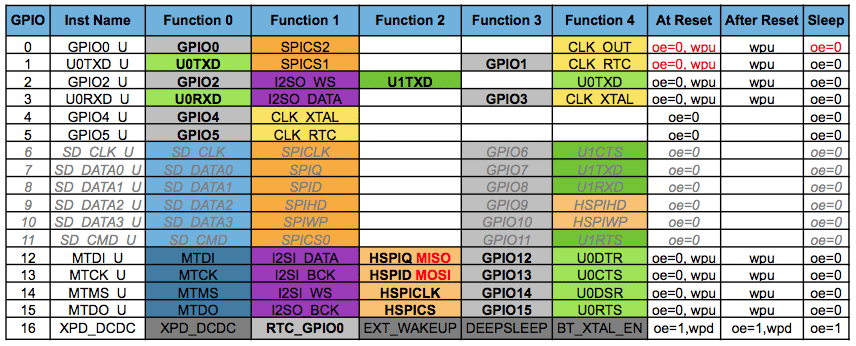
GPIO's ESP8266:
Esta imagem, mostra todas definições de GPIO's do ESP8266, inclusive durante o boot, em que alguns pinos são mantidos em certos estados.
Mãos à obra
Este projeto é o "Hello world" no mundo de Microcontroladores. Você irá ensinar a dar o primeiro upload para piscar o LED_BUILTIN (LED OnBoard) do ESP8266-01 usando um FTDI externo. Pegue a pipoca e vamos la!
Componentes necessários
- 1 - ESP8266-01 ( ESP-01 A ).
- 1 - Módulo FTDI FT232RL - Conversor USB Serial.
- X - Jumper's.
As ligações ficarão parecidas com esta:
Estas são ligaçoes básicas, porém, para cada novo upload, é necessário colocar o GPIO0 em GND, como foi mostrado no esquema, GPIO0 já esta em GND. Não se esqueça dele sempre que for fazer um novo Upload!
Preparando a IDE Arduino
Usaremos a Arduino IDE, mas você pode programa-lo com LUA, ou até a propria SDK.
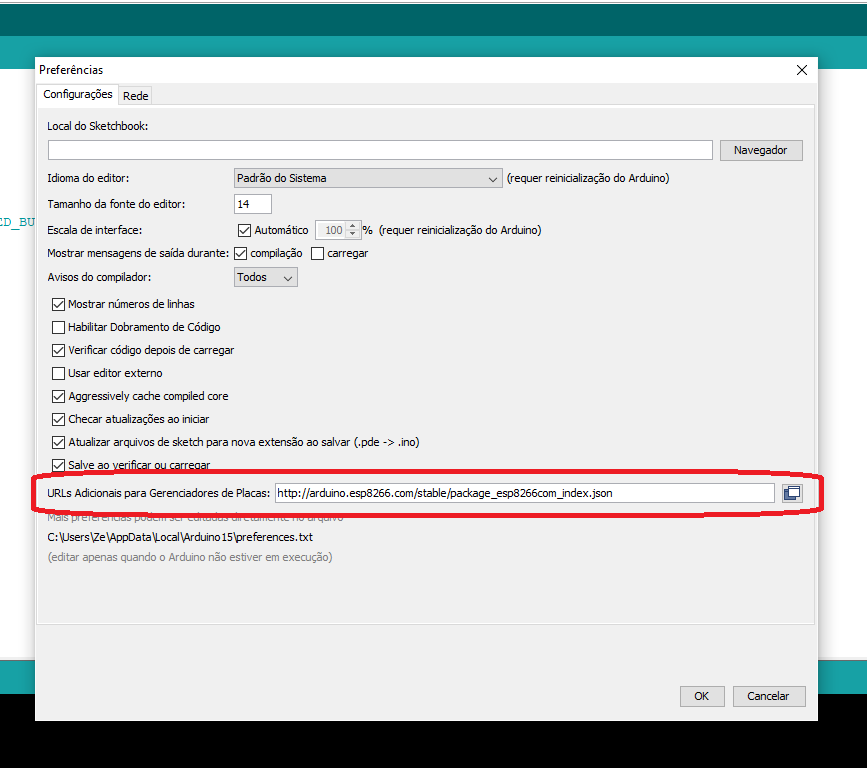
1-) Vá em Arquivos>Preferencias, e adicione este link em "URLs Adicionais...": http://arduino.esp8266.com/stable/package_esp8266com_index.json
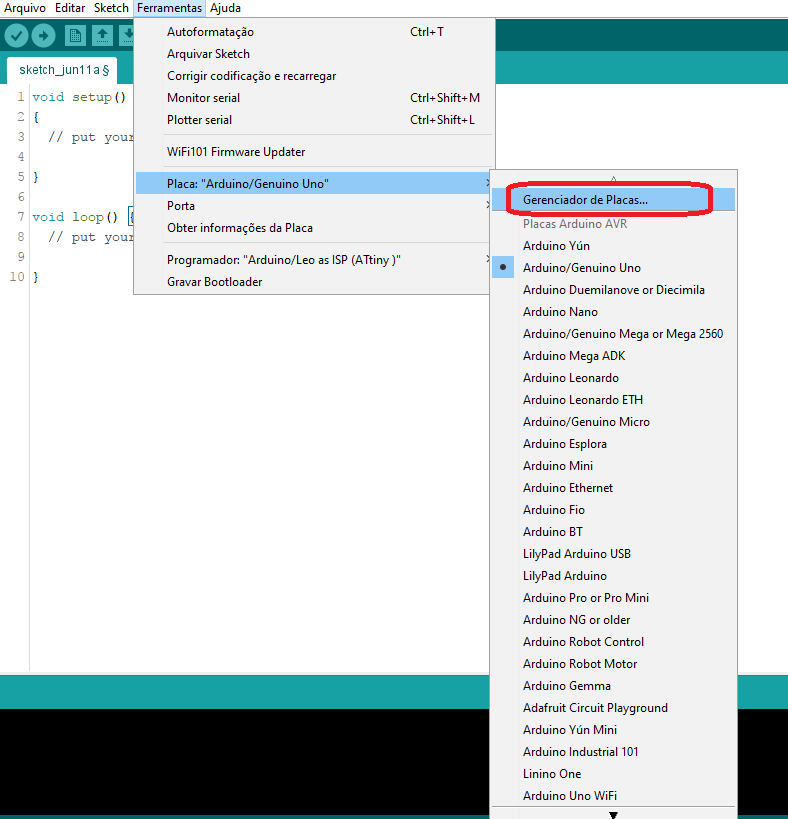
2-) Vá em Ferramentas>Placa>Gerenciador de placas.
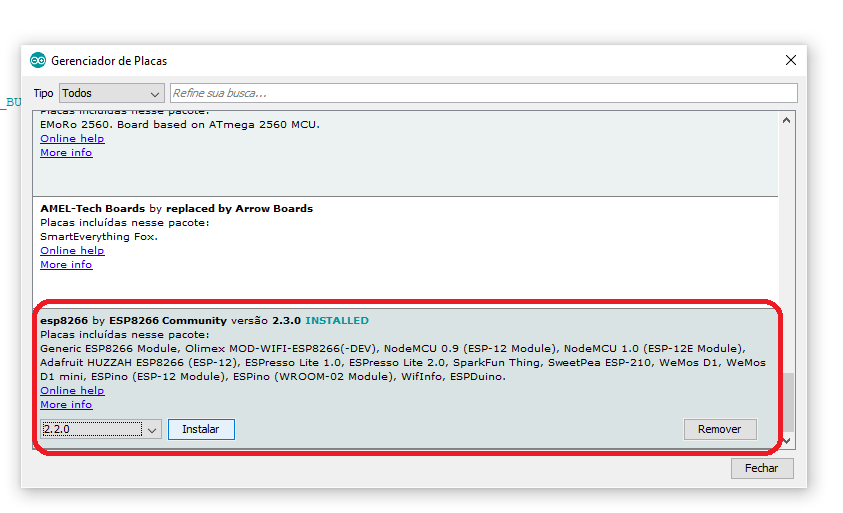
3-) Procure pelo ESP8266 e instale-o.
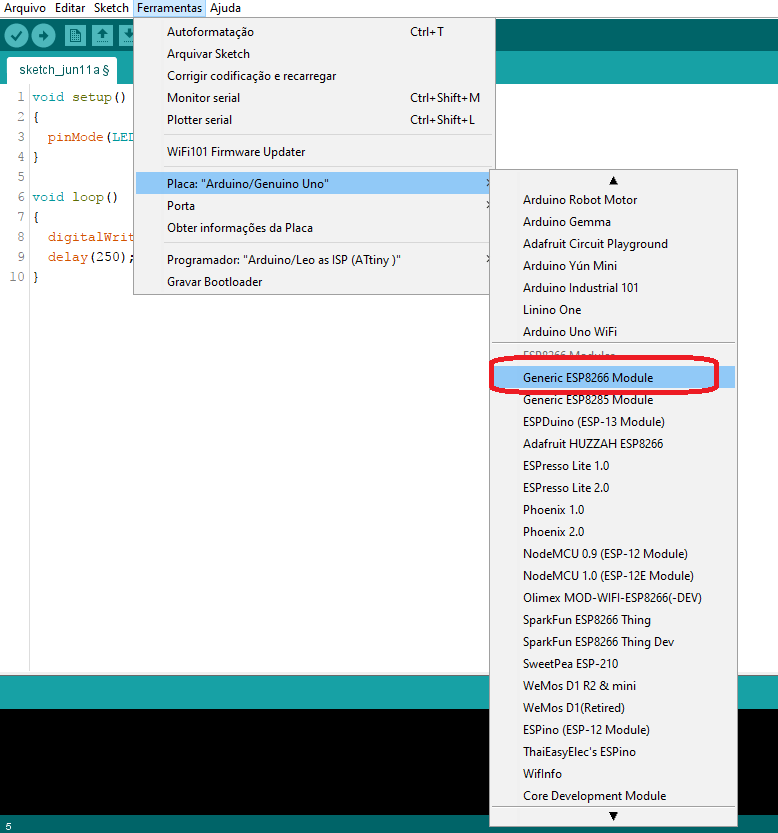
4-) Após instalar as placas do ESP8266, selecione-a em Ferramentas>Placa>Generic ESP8266 Module. (Estou usando o ESP8266-01, caso voce use por exemplo o NodeMCU, selecione NodeMCU...).
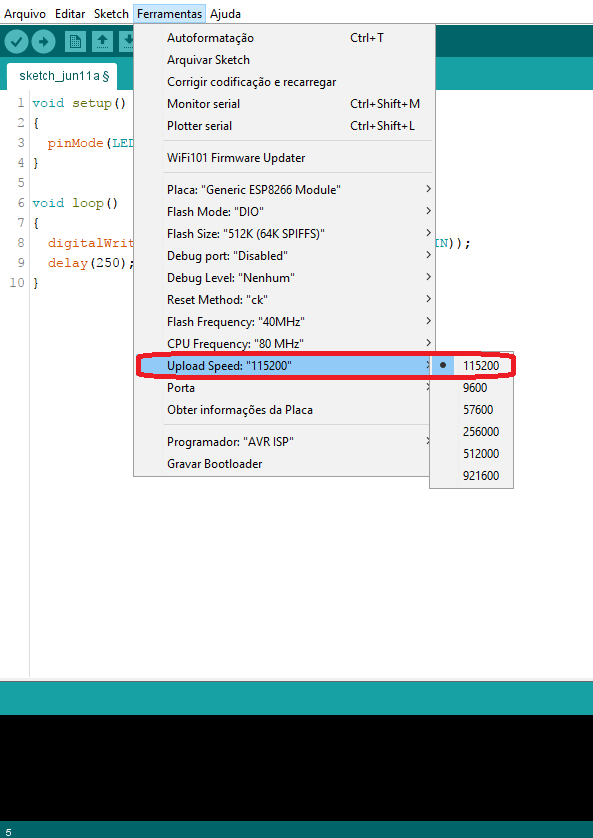
5-) Agora, é só configurar a placa, aconselho a usarem igual ao da foto. Testem primeiramente com o upload a 115200@bps, caso nao funcione, teste com outras velocidades! Não se esqueça de selecionar a porta que estiver seu FTDI.
Sua IDE esta pronta para funcionar com o ESP8266! Vamos ao código!
Código do projeto
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);//Habilita o LED interno como Saida.
}
void loop()
{
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));//Inverte o estado do LED de acordo com a leitura.
delay(250);
}
Entendendo a fundo
Software
-Função pinMode()
pinMode(LED_BUILTIN, OUTPUT);//Habilita o LED interno como Saida.
Esta função define um pino, como saída ou entrada. Neste caso, definimos o pino do LED_BUILTIN como saída.
-Função digitalWrite() e digitalRead()
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));//Inverte o estado do LED de acordo com a leitura.
Aqui, estamos escrevendo um sinal lógico ao LED_BUILTIN. Neste caso, usamos a função digitalRead() que retorna o valor atual de um pino (1 para HIGH e 0 para LOW).
Usamos tambem um Inversor (NOT) "!" para inverter o estado de leitura, ou seja, caso o LED esteja ligado (1), invertemos para (0) e escrevemos isso à porta, assim, desligando-a.
-Função delay()
delay(250);
A função delay(), gera um atraso no código, fazendo com que o micro controlador trave naquela linha e fique até acabar o tempo. O tempo deve ser em mS, sendo que 1 Segundo = 1000mS.
De upload do codigo, e veja que o LED OnBoard (Azul) irá piscar a cada 250mS. Não se esqueça que para dar um novo upload, é necessário que o ESP8266 seja reiniciado com o GPIO0 em GND novamente.
Fechamento
Você aprendeu o que é este incrível microcontrolador e também como dar o primeiro upload à ele. Sinta-se à vontade para dar sugestões, críticas ou elogios. Lembre-se de deixar suas dúvidas nos comentários abaixo.
Você vai gostar de Conhecer o ESP32