Braço Robótico com Arduino
Você com certeza já viu, em vídeos ou livros, aqueles robôs com garras que “pegam” os objetos nas fábricas, não é mesmo? Nesse contexto, os braços robóticos ou garras robóticas são equipamentos fundamentais na execução de grandes processos produtivos, em especial nas linhas de produção, onde se deseja manusear uma série de objetos. Sob o mesmo ponto de vista, neste tutorial, você vai aprender a montar e programar um braço robótico semelhante de maneira simples, usando Arduino. do mesmo modo, você poderá utilizar o braço em conjunto com outros projetos, como um carrinho robô, e o que mais a sua criatividade permitir!


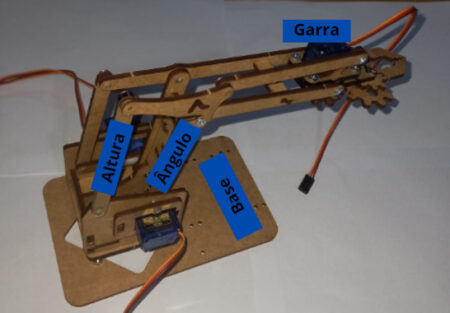
Conforme apresentado na introdução, O braço robótico proposto nesse tutorial possui um mecanismo de funcionamento bastante simples. Isso porque ele é composto por quatro partes, cada uma acoplada por um servo motor diferente. Do mesmo modo, o usuário pode controlar esses motores, um a um, de maneira analógica, o que possibilita diversas combinações de movimentos.
Além disso, para montar a estrutura física do braço robótico, siga a sequência de passos disponível no link abaixo.
Manual de Montagem – Braço Robótico.
Controle e montagem
Com o objetivo de atuar em pequenos projetos de robótica, o braço robótico controlado por Arduino, antes de mais nada, é uma ferramenta de baixo custo e de fácil montagem. Seus movimentos são guiados por 4 servo motores, os quais, por sua vez, podem ser controlados por potenciômetros ou por módulos joystick, através da placa Arduino.

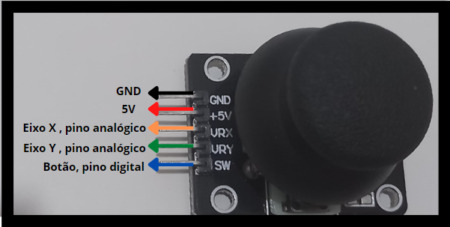
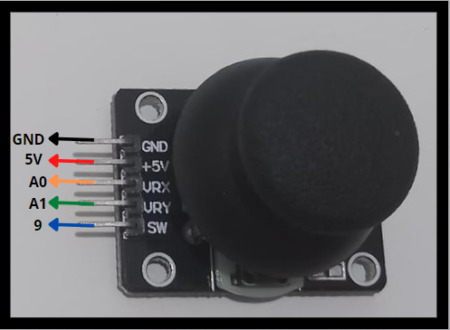
No nosso caso à primeira vista, usaremos dois módulos joystick do tipo KY-023. Bem como você pode observar, esses componentes são semelhantes àqueles utilizados igualmente em vídeo games, e seu princípio de funcionamento ocorre através da atuação de dois potenciômetros e de um botão interno. Em suma, o dispositivo conta com 5 entradas, sendo duas para alimentação, uma digital para acionamento do botão, e as duas últimas para controle analógico do movimento nos eixos x e y.
Mãos à Obra – Braço Robótico com Joystick
Componentes necessários
- Fios Jumper macho-macho
- 1X Kit Braço Robótico
- 1X Arduino UNO
- 2X Protoboards
- 2X Módulos joystick
- 4X Micro Servo Motor SG90
- 1X Adaptador P4/KRE fêmea
- 4X Suporte para 4 pilhas
- 4X Pilhas AA
Montando o circuito de controle do braço robótico
Inicialmente, vamos montar o circuito elétrico (hardware) do projeto. Porém, antes de tudo, desligue o cabo USB de seu Arduino e faça a montagem seguindo a ligação das figuras abaixo.
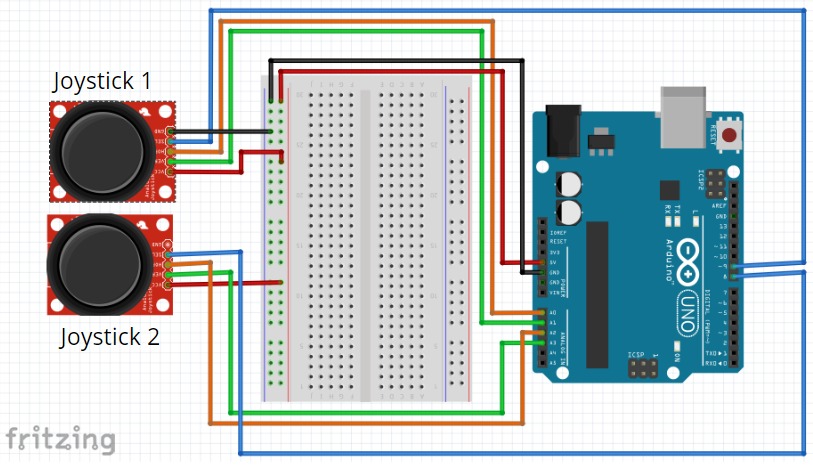
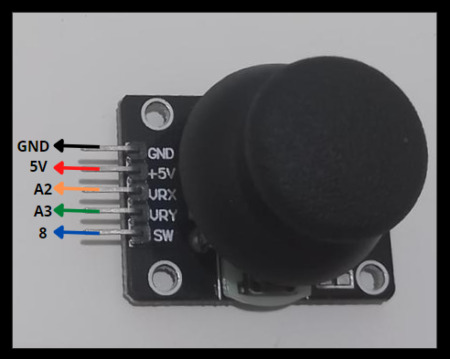
Além disso, fique atento à conexão dos pinos de ambos os módulos joysticks, conforme as imagens abaixo:
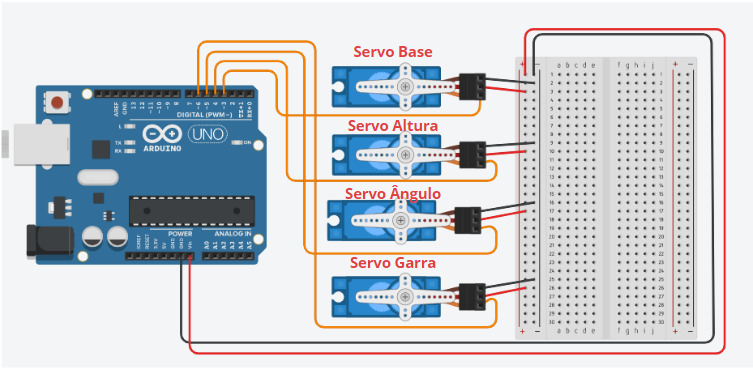
Além da conexão dos joysticks, você deve conectar os servo motores do braço robótico ao Arduino. Sendo assim, utilizando o mesmo Arduino da montagem anterior, faça a seguinte ligação entre os componentes.
Alimentação do projeto
Você deve ter observado, na parte 2 da montagem do circuito, o barramento o positivo dos servo motores está conectado ao “Vin” e não ao pino 5V, como fazemos usualmente. Isso ocorre porque, para alimentar esses motores, precisaremos de uma tensão superior a 5V. Para isso, utilizamos 4 pilhas, cada uma com 1,5V, e fazemos a seguinte conexão dessas pilhas ao Arduino:
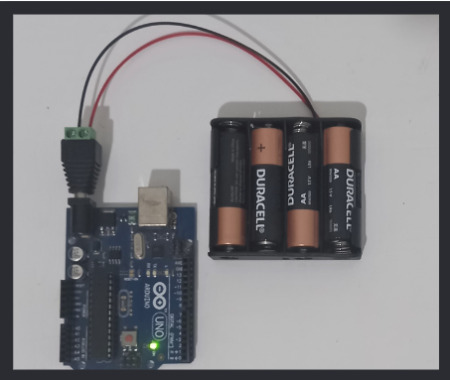
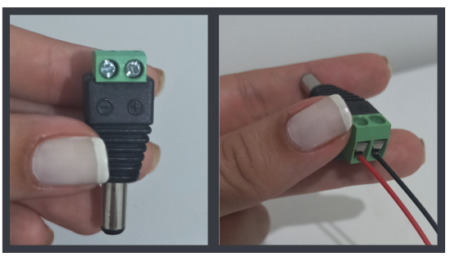
Ademais, fique atento a essa conexão, verificando sempre se o positivo da pilha está conectado ao positivo do adaptador.
Programando o Arduino para controlar o Braço Robótico
Importação da biblioteca “VarSpeedServo”
Em paralelo à montagem do circuito, você deve implementar o código. Porém, antes disso, instale a biblioteca “VarSpeedServo” em seu computador, clicando no link abaixo:
Além disso, para usar essa biblioteca no código, siga a sequência de passos abaixo:
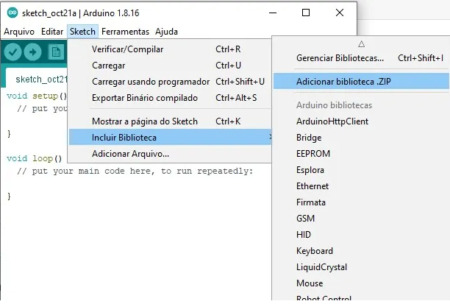
1- Após a criação do sketch, selecione o ícone “sketch” e, em seguida, clique em “Adicionar biblioteca.ZIP”.
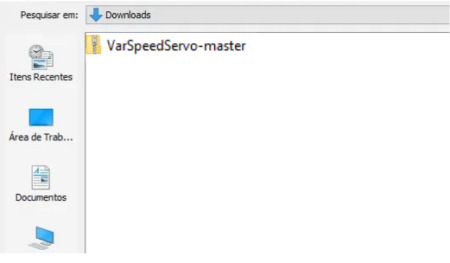
2- Agora, escolha o local onde você salvou o arquivo .zip da biblioteca. Imediatamente, clique no arquivo e no botão Abrir.
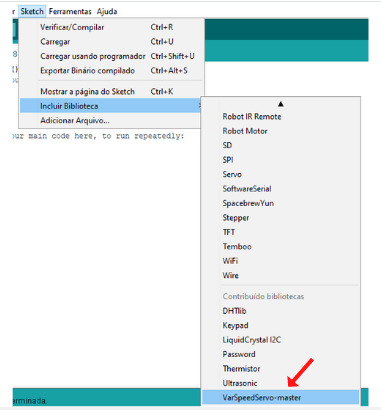
Dessa forma, após seguir os passos acima, você vai receber a mensagem de que a biblioteca está instalada e pode conferir em Sketch/Incluir Biblioteca.
Com isso, após a instalação da instalação da biblioteca, salve o sketch, de preferência, com o nome de “programa_braco_joystick”. Logo depois de salvar, copie e cole o código abaixo.
#include <VarSpeedServo.h> //biblioteca para controle da velocidade e da posição dos servos
#define servoBase 3 // Porta Digital do Servo da Base
#define servoAltura 4 // Porta Digital do Servo da Altura do Braço
#define servoAngulo 5 // Porta Digital do Servo do Ângulo do Braço
#define servoGarra 6 // Porta Digital do Servo da Garra
#define potBase A0 // Porta Analógica do Potenciometro para Controle da base
#define potAltura A1 // Porta Analógica do Potenciometro para Controle da altura do braço
#define potAngulo A2 // Porta Analógica do Potenciometro para Controle do ângulo do braço
#define potGarra A3 // Porta Analógica do Potenciometro para Controle da garra
#define botao_trava 8 // Porta Digital do Botao trava
#define botao_destrava 9 // Porta Digital do Botao trava
//Instanciação dos Objetos de Controle dos Servos
VarSpeedServo base;
VarSpeedServo altura;
VarSpeedServo angulo;
VarSpeedServo garra;
//Variaveis para cálculo dos angulos
int leitura_Base;
int valor_Base;
int leitura_altura;
int valor_altura;
int leitura_angulo;
int valor_angulo;
int leitura_garra;
int valor_garra;
//Variaveis para controle dos botões
int estado_trava, estado_destrava;
int anterior_trava = HIGH;
int anterior_destrava = HIGH;
boolean travado = false;
void setup(){
pinMode(botao_trava, INPUT_PULLUP);
pinMode(botao_destrava, INPUT_PULLUP);
//Usa o LED do Arduino para informar estado de congelado
pinMode(13, OUTPUT);
digitalWrite(13, LOW);
//Configuração das Portas dos Servos
base.attach(servoBase);
altura.attach(servoAltura);
angulo.attach(servoAngulo);
garra.attach(servoGarra);
}
void loop() {
if (!travado) {
leitura_Base = analogRead(potBase); //Leitura do Angulo do Potenciometro
valor_Base = map(leitura_Base, 0, 1023, 0, 180); //Conversão do valor do potenciometro (de 0 até 1024) para o angulo (de 0 até 180)
base.slowmove(valor_Base, 30); //envio do ângulo para o servo
leitura_altura = analogRead(potAltura); //Leitura do Angulo do Potenciometro
valor_altura = map(leitura_altura, 0, 1023, 180, 0); //Conversão do valor do potenciometro (de 0 até 1024) para o angulo (de 0 até 180)
altura.slowmove(valor_altura, 40); //envio do ângulo para o servo
leitura_angulo = analogRead(potAngulo); //Leitura do Angulo do Potenciometro
valor_angulo = map(leitura_angulo, 0, 1023, 180, 0); //Conversão do valor do potenciometro (de 0 até 1024) para o angulo (de 0 até 180)
angulo.slowmove(valor_angulo,40); //Envio do angulo para o Servo
leitura_garra = analogRead(potGarra); //Leitura do Angulo do Potenciometro
valor_garra = map(leitura_garra, 0, 1023, 0, 50); //Conversão do valor do potenciometro (de 0 até 1024) para o angulo (de 0 até 180)
garra.slowmove(valor_garra, 40); //envio do ângulo para o servo
}
//Se o botao de congelar foi apertado
estado_trava = digitalRead(botao_trava);
if (estado_trava != anterior_trava) {
travado = true;
digitalWrite(13, HIGH); //Informa o estado de congelado no LED interno do Arduino
}
anterior_trava = estado_trava;
//Se o botao de descongelar foi apertado
estado_destrava = digitalRead(botao_destrava);
if (estado_destrava != anterior_destrava) {
travado = false;
digitalWrite(13, LOW); //Informa o estado de congelado no LED interno do Arduino
}
estado_destrava = anterior_destrava;
}
Dessa forma, após testar tanto o código quanto a montagem, o resultado deve ser semelhante ao que aparece no gif:
Entendendo a fundo
Software
Vamos agora partir para a análise do código. Nele, podemos encontrar uma série de conceitos, como os de entradas analógicas e digitais, PWM e funções referentes ao controle de servo motores.
Biblioteca VarSpeedServo
Logo no início do programa, podemos observar a inclusão da biblioteca “VarSpeedServo.h”.
#include <VarSpeedServo.h> //biblioteca para controle da velocidade e da posição dos servos
Basicamente, essa biblioteca conta com uma série de funções específicas para controlar tanto a posição (em graus) quanto a velocidade de um servo motor.
Configuração dos motores
Neste código, cada um dos quatro servo motores é dado como um objeto. Consequentemente, devemos nomear cada um deles e fazer sua instanciação.
VarSpeedServo base; //servo para controle do motor da base do braço VarSpeedServo altura; //servo para controle do motor da altura do braço VarSpeedServo angulo; //servo para controle do motor do ângulo do braço VarSpeedServo garra; //serve para controle do motor da garra.
Além disso, a partir do método “attach”, é feita a configuração das portas dos servos.
//Configuração das Portas dos Servos base.attach(servoBase); // servo base localizado no pino 3 altura.attach(servoAltura); // servo altura localizado no pino 4 angulo.attach(servoAngulo); //servo angulo localizado no pino 5 garra.attach(servoGarra); //servo garra localizado no pino 6
Função analogRead()
A função “analogRead”, como o nome já indica, tem como objetivo ler o valor de um pino analógico do Arduino. Sendo assim, essa função irá mapear tensões entre 0V e 5V, a partir do potenciômetro, para valores inteiros de 0 a 1023.
leitura_Base = analogRead(potBase); //Leitura do Angulo do Potenciometro
Já a variável “leitura_base”, por sua vez, serve para armazenar esse valor de 0 a 1023, o qual representa a leitura do potenciômetro.
Função map()
A função “map()” é uma função matemática de referência do Arduino. Nesse sentido, ela é tem como objetivo fazer a conversão de valores de um determinado intervalo numérico para o outro.
valor_Base = map(leitura_Base, 0, 1023, 0, 180); //Conversão do valor do potenciometro (de 0 até 1024) para o angulo (de 0 até 180)
Assim, no nosso código, tal função atua da seguinte maneira: o valor lido no potenciômetro, entre 0 e 1023, e armazenado na variável “leitura_base” é convertido para um valor em ângulo, de 0 a 180. Em seguida, esse valor angular obtido é armazenado na variável “valor_base”.
Método slowmove
base.slowmove(valor_Base, 30); //envio do ângulo para o servo
Nessa parte do código, o método “slowmove” é aplicado a cada um dos objetos, ou melhor, a cada um dos motores: base, ângulo, altura e garra. Dessa forma, tal método tem como parâmetros a posição angular (“valor_base”) e a velocidade (30) com que o motor deve operar.
Controle dos botões
Ambos os joysticks possuem botões: o botão 8, no joystick 2 realiza a tarefa de travar os movimentos dos motores; já o botão 9, no joystick 1, tem a função de destravar esses motores. Dessa forma, a lógica desse mecanismo é apresentada no seguinte trecho de código:
//Se o botao de travar foi apertado
estado_trava = digitalRead(botao_trava);
if (estado_trava != anterior_trava) {
travado = true;
digitalWrite(13, HIGH); //Informa o estado de travado no LED interno do Arduino
}
anterior_trava = estado_trava;
//Se o botao de destravar foi apertado
estado_destrava = digitalRead(botao_destrava);
if (estado_destrava != anterior_destrava) {
travado = false;
digitalWrite(13, LOW); //Informa o estado de destravado no LED interno do Arduino
}
estado_destrava = anterior_destrava;
}
Inicialmente, se a o botão de travamento for pressionado, seu estado é alterado, e, devido a isso, a variável de controle “travado” receberá o valor lógico “true”.
//Se o botao de travar foi apertado
estado_trava = digitalRead(botao_trava);
if (estado_trava != anterior_trava) {
travado = true;
digitalWrite(13, HIGH); //Informa o estado de congelado no LED interno do Arduino
}
anterior_trava = estado_trava;
Do mesmo modo, quando o botão de destravamento estiver pressionado, seu estado também será alterado. No entanto, nesse caso, a variável de controle “travado” receberá o valor lógico “false”.
//Se o botao de descongelar foi apertado
estado_destrava = digitalRead(botao_destrava);
if (estado_destrava != anterior_destrava) {
travado = false;
digitalWrite(13, LOW); //Informa o estado de congelado no LED interno do Arduino
}
estado_destrava = anterior_destrava;
Em paralelo a isso, no início do algoritmo, a condição estabelecida é de que, para que os motores atuem, a variável “travado” deve receber o valor lógico “false”. Dessa forma, consequentemente, a condição de acionamento dos motores será satisfeita somente se o botão de destravamento for pressionado.
Fechamento
Enfim, esperamos que tenham gostado, deixe seu comentário com duvidas, sugestões ou com a foto ou vídeo de seu projeto! Compartilhe à vontade.
Boa tarde!
Estou começando agora com Arduino, como posso adicionar ao código quando o braço começar a realizar os movimentos um led de sinalização, que a existe operação
Boa tarde, sou professor de matemática e sou leigo ainda no assunto de programação de arduino e comprei um braço robotico para trabalhar em sala de aula, minha pergunta é: Como seria o programa para 6 servos ? Poderia me ajudar por favor?